Mateksys
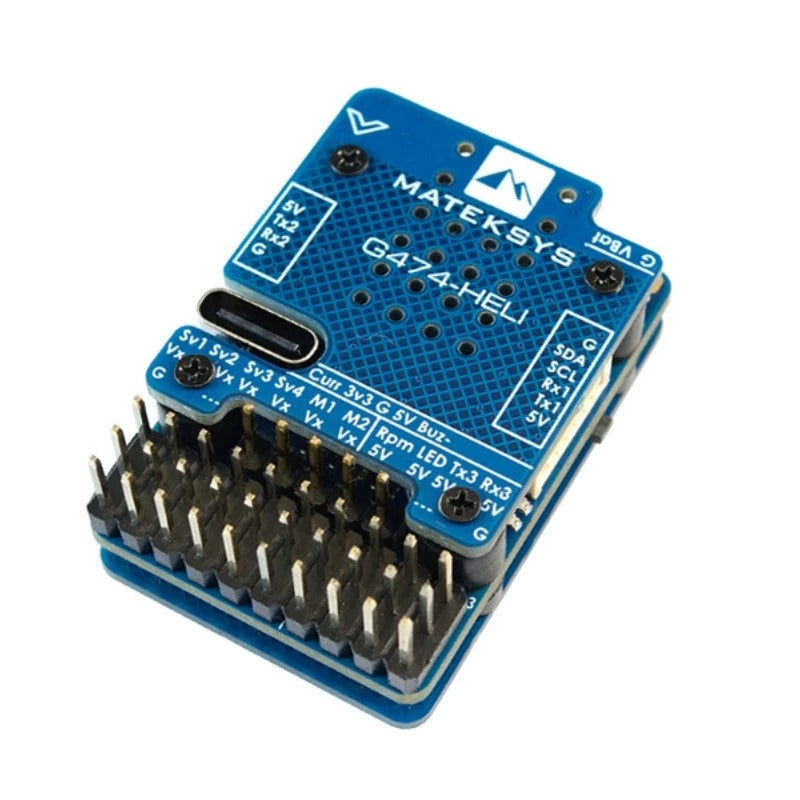
MAT-G474-HELI MATEK Mateksys RC HELICOPTER FLYBARLESS CONTROLLER G474-HELI STM32G474, ICM42688P, SPL06L, 2x BEC, Rotorflight
MAT-G474-HELI MATEK Mateksys RC HELICOPTER FLYBARLESS CONTROLLER G474-HELI STM32G474, ICM42688P, SPL06L, 2x BEC, Rotorflight
Limited stock — Order soon
⚡ Ships Fast from Massachusetts
Couldn't load pickup availability
- Ships from USA
- RC Specialists
- Local Pickup
MAT-G474-HELI MATEK Mateksys RC HELICOPTER FLYBARLESS CONTROLLER G474-HELI STM32G474, ICM42688P, SPL06L, 2x BEC, Rotorflight
Specifications
Electrical characteristics:
-
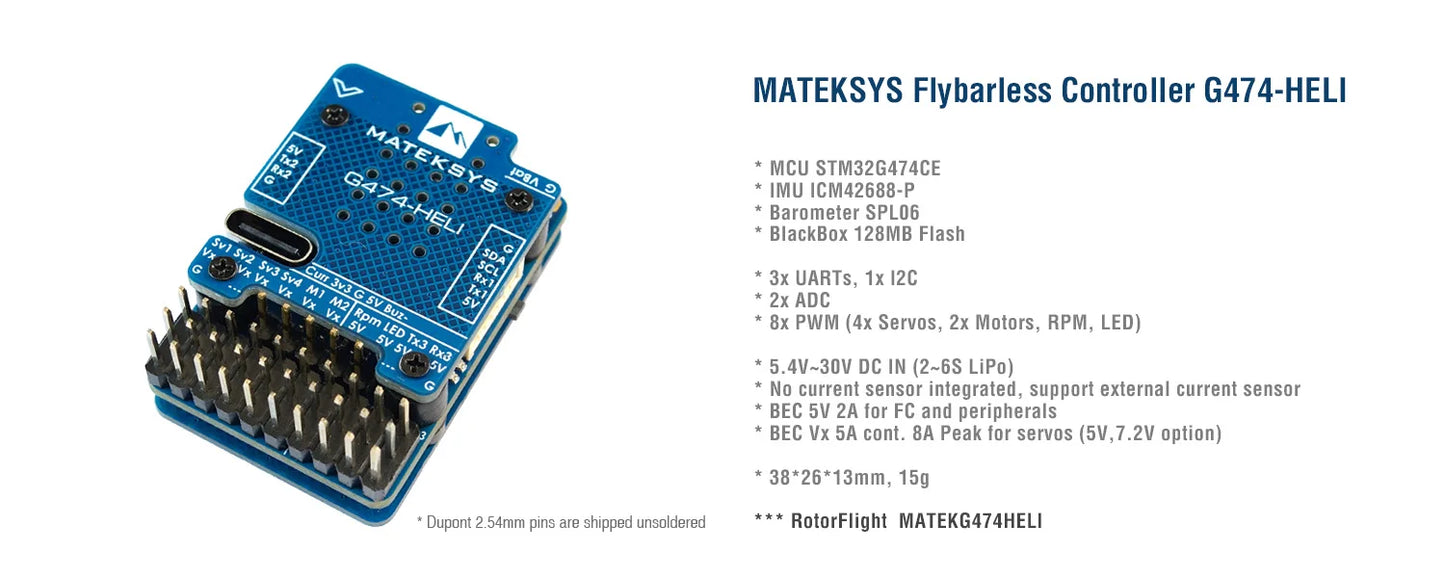
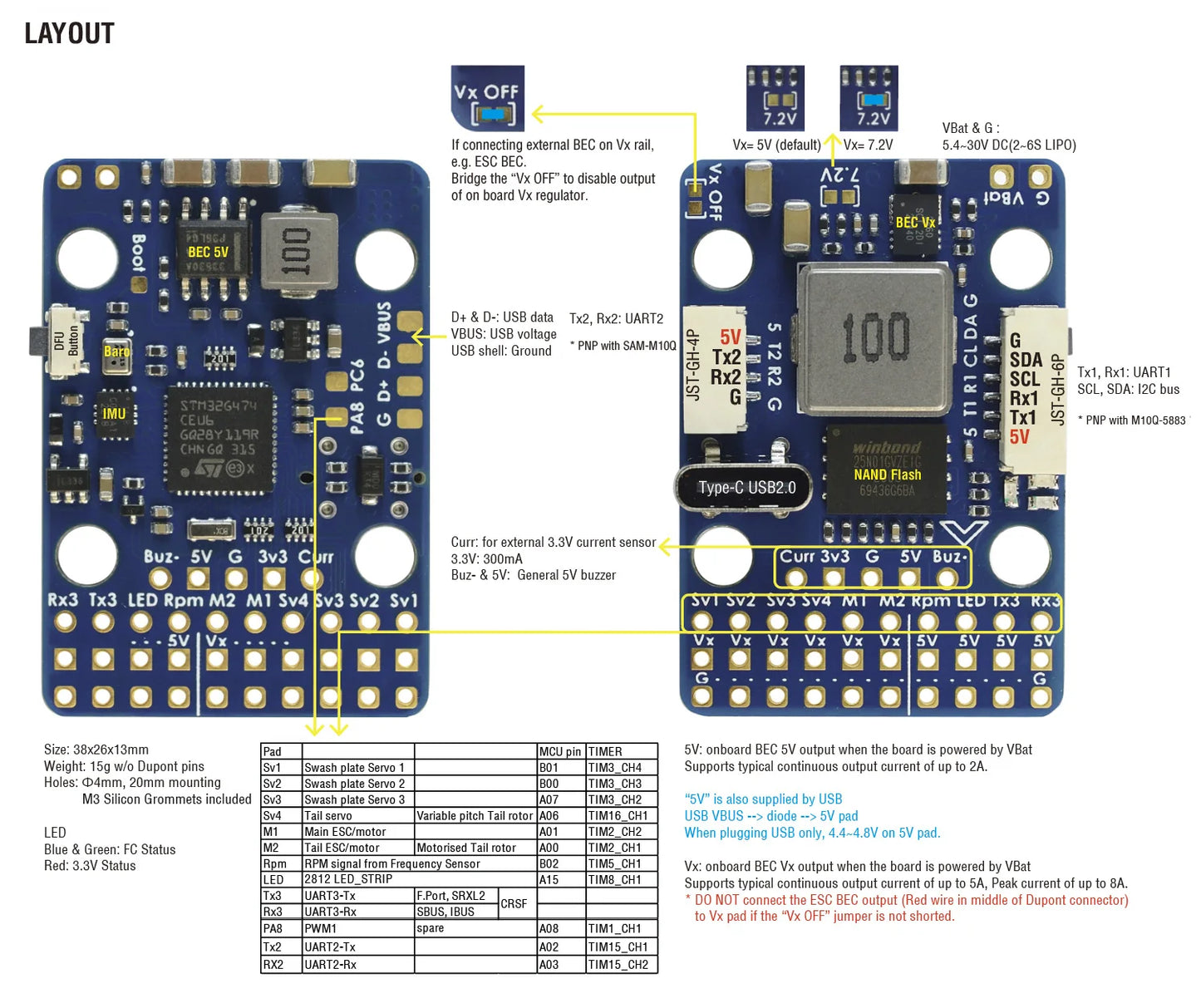
Input voltage range: 5.4V~30V (2~6S LiPo)
-
No current sensor integrated, support external 3.3V based current sensor.
-
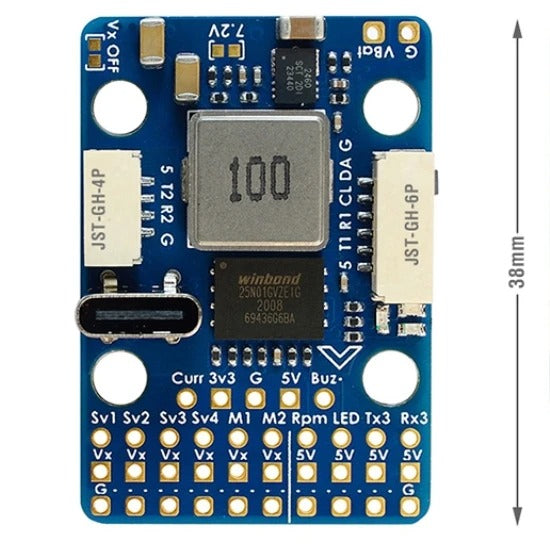
Battery Voltage divider 1K:10K (Scale 110)
-
BEC 5V 2A for FC and peripherals
-
BEC Vx 5A cont. 8A Peak for servos (5V, 7.2V option)
-
3.3V 300mA
Firmware/config:
-
Rotorflight 1.x /2.x / MATEKG474HELI
Physical:
-
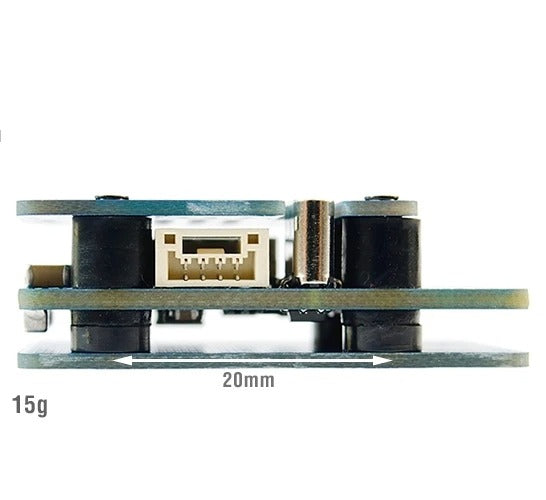
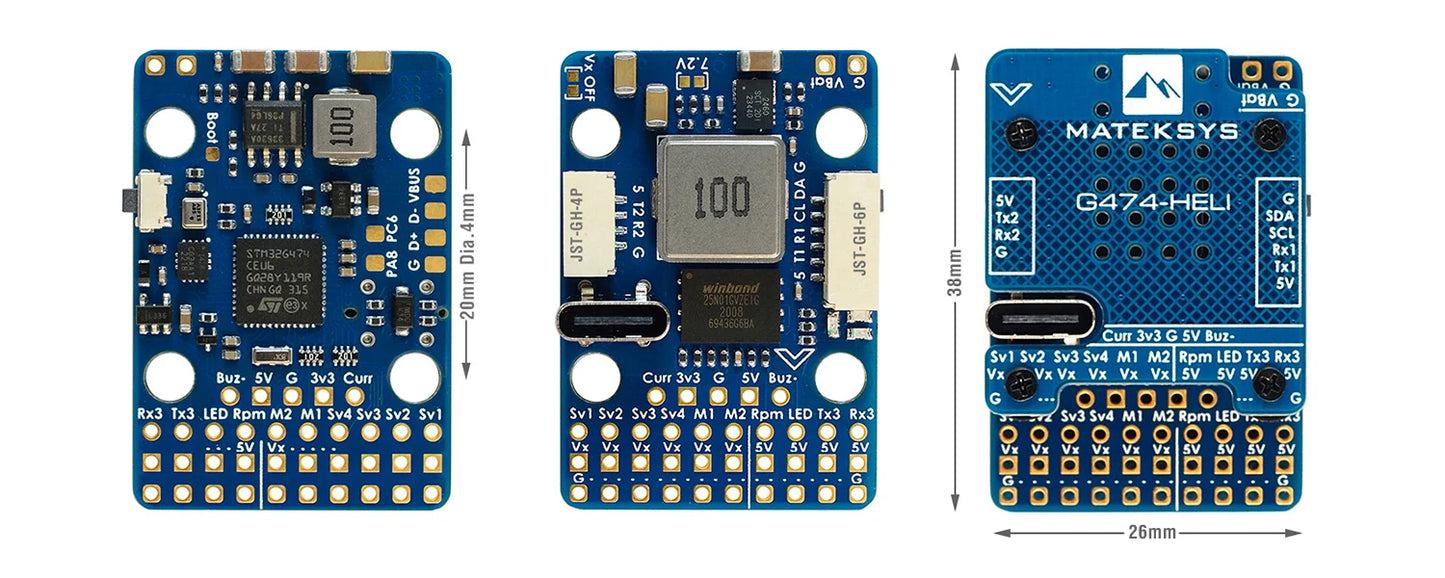
Mounting: 20 x 20mm, Φ4mm with Grommets Φ3mm
-
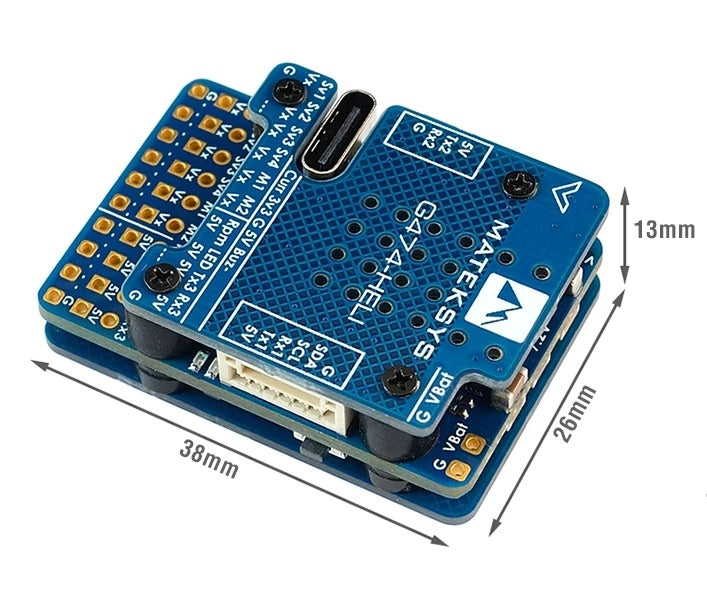
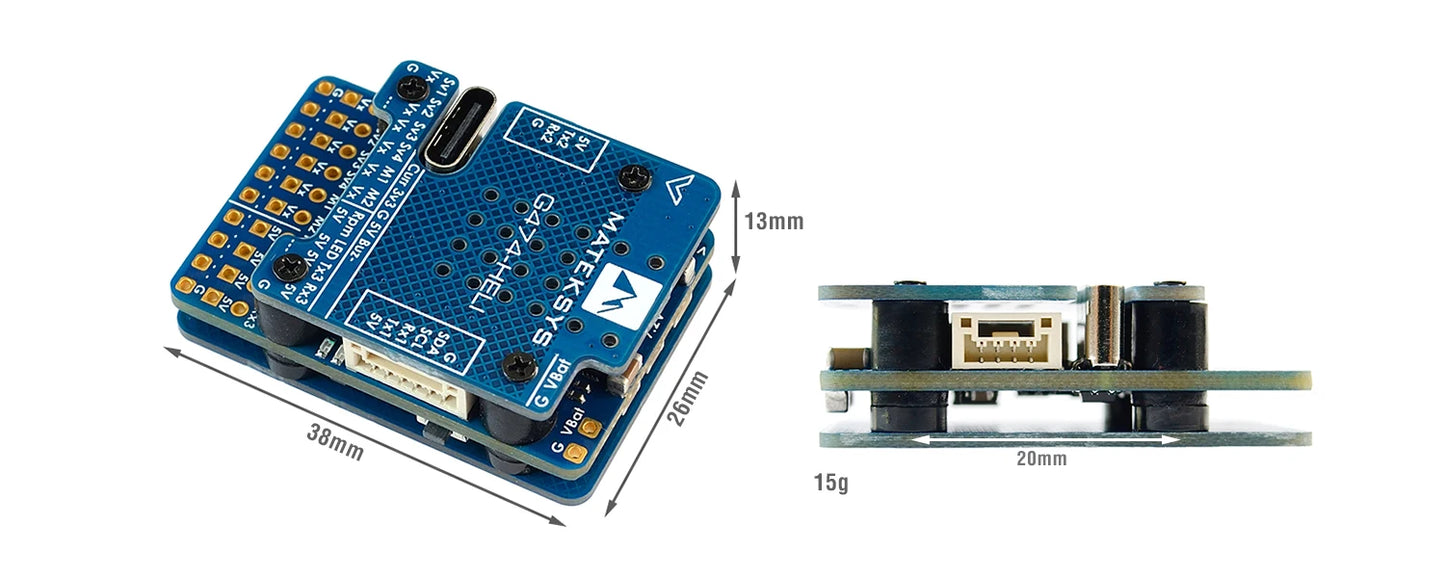
Dimensions: 38 x 26 x 13 mm
-
Weight: 15g (w/o pins)
Includes:
-
1x G474-HELI
-
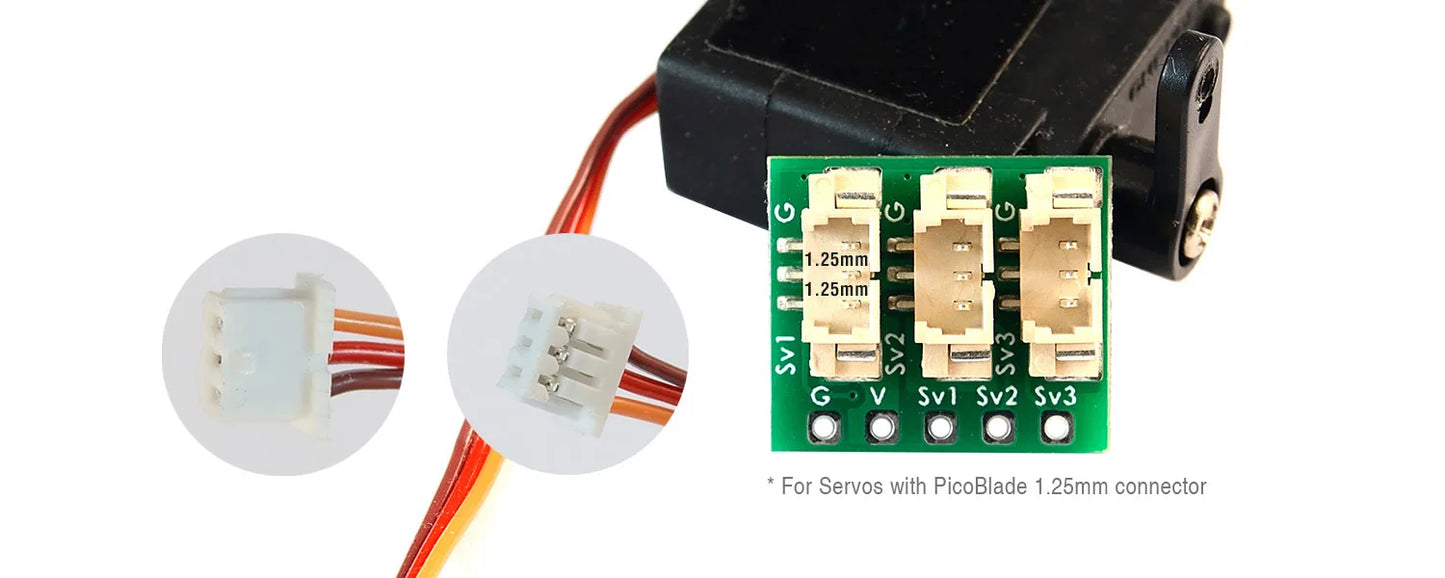
1x PicoBlade 1.25mm Servo adapter (M2/S2 servos)
-
1x 20cm JST-GH-4P to JST-GH-4P cable
-
1x 20cm JST-GH-6P to JST-GH-6P cable
-
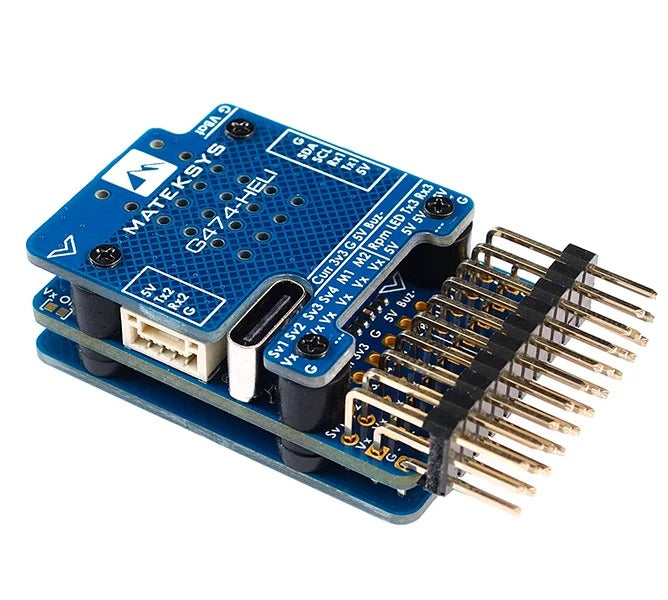
Dupont 2.54 pins (Board is shipped unsoldered)
Tips
-
If GPS, Receiver or other peripherals are connected to UART2(Tx2,Rx2) and these peripherals are powered ON while connecting USB. STM32G474 will not go into DFU mode. It is related to DFU protocol used in the STM32G474 bootloader. Pls unplug peripherals from UART2 before you try flashing the FC.
-
If using Frsky SBUS+SmartPort receivers. you may remap one of PWM pins to softserial_tx for SmartPort, e.g. LED pin, “resource serial_tx 11 A15”, “feature softserial”.
-
Due to leakage voltage on MCU I/O, there is floating current readout when no external current sensor connected. If you don’t use external current sensor. “set current_meter = NONE”.
-
There is no UART4 breakout on this board.
RC HELICOPTER FLYBARLESS CONTROLLER G474-HELI
STM32G474, ICM42688P, SPL06L, 2x BEC, Rotorflight firmware